《基于STC89C52單片機(jī)智能小車設(shè)計(jì)》由會(huì)員分享,可在線閱讀���,更多相關(guān)《基于STC89C52單片機(jī)智能小車設(shè)計(jì)(3頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索�。
1����、基于 STC89C52 單片機(jī)智能小車設(shè)計(jì)
摘 要 : 本設(shè)計(jì) 主要 ~~STC89C52 單片機(jī) 為控 制核 心 ���, 通過(guò) 紅 外傳感 器利用紅 外 探 測(cè)法 實(shí)現(xiàn) 小車的 自主尋跡避 障功 能 ,并且利 用 多路 紅 外發(fā)射 器和一體 化紅 外接 收頭 實(shí)現(xiàn) 小車的紅 外遙控 功 能, 使 小車不但 具備 自主尋跡避 障功 能 �, 也 能 夠進(jìn)行 人 工控 制 ���,使 小車的功 能得到進(jìn) 一 步的 完善�����。詳 細(xì)介紹該 智 能小 車的 控 制模塊 ����、避 障模塊 ���、尋跡模 塊 ����、紅外接 收模塊 �、 電機(jī) 驅(qū)動(dòng)模 塊����。給 出各 功 能 實(shí)現(xiàn) 的程序 設(shè)計(jì) 流程 圖 ��, 并 進(jìn) 行尋跡 、 避 障
2����、、 紅外遙控 及相 關(guān)實(shí)驗(yàn) �, 通過(guò) 實(shí)
驗(yàn)發(fā)現(xiàn)基于STC89C52單片機(jī)的智能小車系統(tǒng)結(jié)構(gòu)簡(jiǎn)單�����,性價(jià)比高�,易于推廣和移 植,具有廣闊的應(yīng) 用前景�����。 關(guān)鍵詞:STC89C52;避障���;尋跡�����;紅外遙控 中 圖分類 號(hào) : TP242 文獻(xiàn)標(biāo)識(shí) 碼 : A 文章編 號(hào) : 1671— 7597 (2012)0610043— 02
隨著科學(xué)技術(shù) 的快速發(fā)展����, 智能車的使用越來(lái)越普及 , 相 對(duì) 于傳統(tǒng) 的汽車而 言�, 智能
小車有著更好 的安全性 , 機(jī)動(dòng) 性和 廣泛 的應(yīng)用性 �����。 基于單 片機(jī)的普及及應(yīng)用 和人們 對(duì)產(chǎn) 品智 能化 的需求 , 本設(shè)計(jì)基 于 STC89C52 單 片機(jī) 使智能小
3�、車實(shí)現(xiàn) 尋跡 避障 行
駛 的基礎(chǔ)上加裝 紅外 遙控功能 �����, 能讓智 能小車的功 能更 加完 善和 人性化 �。 通過(guò) 調(diào)
查發(fā)現(xiàn)在 日常生活和 工廠生產(chǎn) 中, 智 能小 車 的開(kāi)發(fā)和研究具有十 分重要的意義 �����。 該
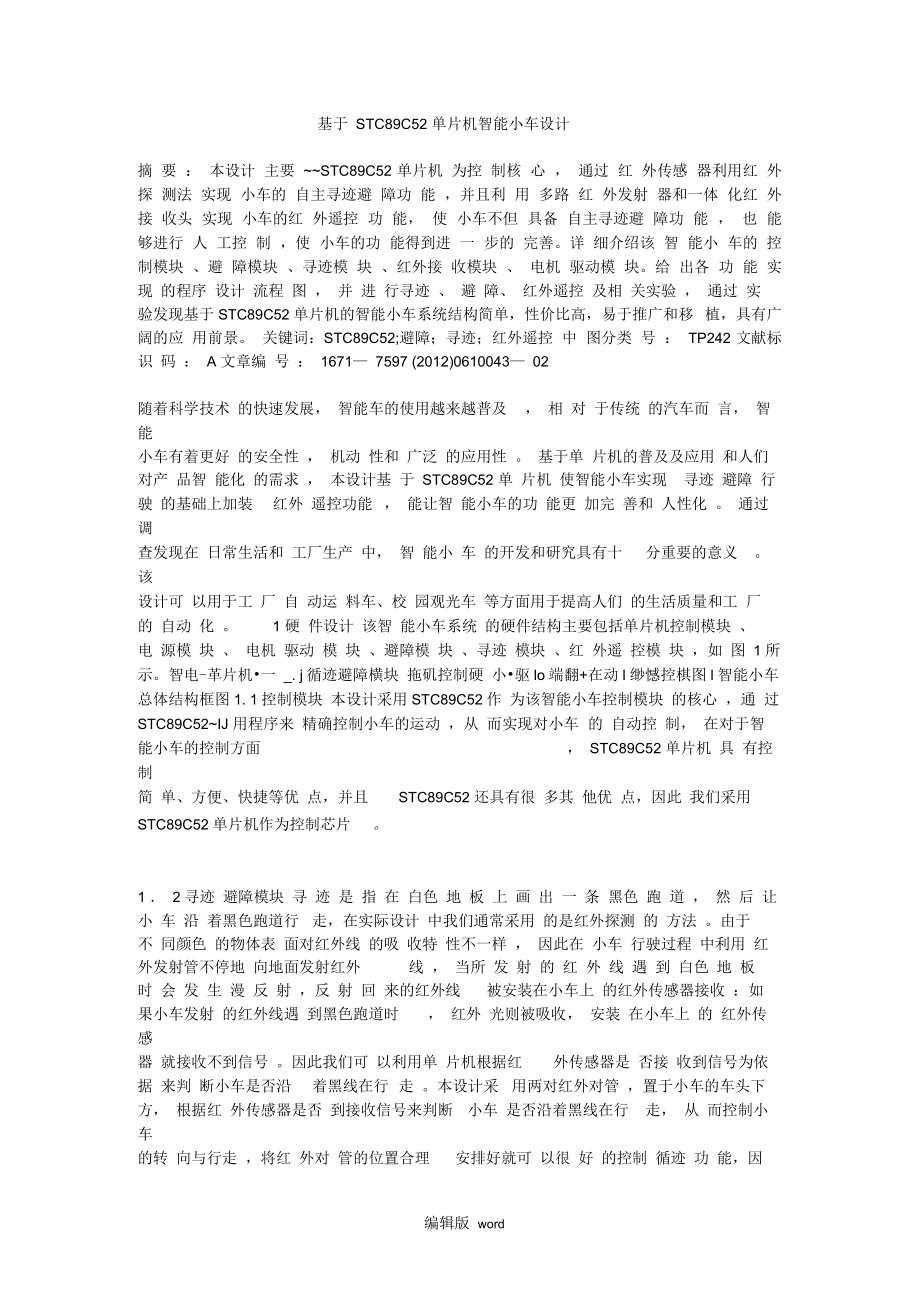
設(shè)計(jì)可 以用于工 廠 自 動(dòng)運(yùn) 料車、校 園觀光車 等方面用于提高人們 的生活質(zhì)量和工 廠 的 自動(dòng) 化 �。 1 硬 件設(shè)計(jì) 該智 能小車系統(tǒng) 的硬件結(jié)構(gòu)主要包括單片機(jī)控制模塊 ���、
電 源模 塊 ����、 電機(jī) 驅(qū)動(dòng) 模 塊 ��、避障模 塊 ����、尋跡 模塊 、紅 外遙 控模 塊 ���,如 圖 1所示。智電-革片機(jī)?一 _. j循跡避障橫塊 拖磯控制硬 小?驅(qū)lo端翻+在動(dòng)l 緲憾控棋圖l
4�����、智能小車總體結(jié)構(gòu)框圖1. 1控制模塊 本設(shè)計(jì)采用STC89C52作 為該智能小車控制模塊 的核心 ,通 過(guò) STC89C52~IJ 用程序來(lái) 精確控制小車的運(yùn)動(dòng) ,從 而實(shí)現(xiàn)對(duì)小車 的 自動(dòng)控 制����, 在對(duì)于智 能小車的控制方面 , STC89C52 單片機(jī) 具 有控制
簡(jiǎn) 單��、方便��、快捷等優(yōu) 點(diǎn)���,并且 STC89C52 還具有很 多其 他優(yōu) 點(diǎn)�,因此 我們采用
STC89C52單片機(jī)作為控制芯片 。
1 . 2尋跡 避障模塊 尋 跡 是 指 在 白色 地 板 上 畫(huà) 出 一 條 黑色 跑 道 �, 然 后 讓 小 車 沿 著黑色跑道行 走��,在實(shí)際設(shè)計(jì) 中我們通常采用 的是紅外探測(cè) 的 方法
5、 ����。由于
不 同顏色 的物體表 面對(duì)紅外線 的吸 收特 性不一樣 �, 因此在 小車 行駛過(guò)程 中利用 紅 外發(fā)射管不停地 向地面發(fā)射紅外 線 , 當(dāng)所 發(fā) 射 的 紅 外 線 遇 到 白色 地 板
時(shí) 會(huì) 發(fā) 生 漫 反 射 ���,反 射 回 來(lái)的紅外線 被安裝在小車上 的紅外傳感器接收 :如
果小車發(fā)射 的紅外線遇 到黑色跑道時(shí) ��, 紅外 光則被吸收 , 安裝 在小車上 的 紅外傳感
器 就接收不到信號(hào) ���。因此我們可 以利用單 片機(jī)根據(jù)紅 外傳感器是 否接 收到信號(hào)為依
據(jù) 來(lái)判 斷小車是否沿 著黑線在行 走 �。本設(shè)計(jì)采 用兩對(duì)紅外對(duì)管 ,置于小車的車頭下
方���, 根據(jù)紅 外傳感器是否
6�����、 到接收信號(hào)來(lái)判斷 小車 是否沿著黑線在行 走, 從 而控制小車
的轉(zhuǎn) 向與行走 �,將紅 外對(duì) 管的位置合理 安排好就可 以很 好 的控制 循跡 功 能����,因
此 小車采 用上述 方 案實(shí)現(xiàn) 尋跡 功 能 ����, 電路 原理 圖如 圖 3 所示 , 圖中 D2 ���、 D4 為 紅外 發(fā)射 管 �, Dl 、 D3 為紅外接 收管避障主要 由 l 對(duì)紅外對(duì)管組成 �����, 其 中常用 的
紅外 對(duì)管 由一個(gè) 紅外發(fā)射管和一個(gè)紅 外接 收傳感器組成 ���。本設(shè)計(jì) 中 避 障 也 采用
紅 外 探測(cè) 法 ����, 將 1 只 紅 外 對(duì) 管 ����, 置 于 小 車 的前 方 �, 根 據(jù)接收管接 收信 號(hào)
與否來(lái)控制小
7�、車的運(yùn) 動(dòng)方 向�,如 果小車接收 到 信 號(hào) ���,則 表 明 前 方 有 障 礙
物 �����, 則 小 車 后 退 一 段 時(shí) 間 ���, 然 后 旋 轉(zhuǎn)一個(gè)角度避 開(kāi)障礙 物 ����,再繼續(xù) 向
便可 以很好 的實(shí)現(xiàn)小車 的避障
前行進(jìn) , 對(duì)小車后退 及轉(zhuǎn)彎 的時(shí)間進(jìn)行合 理的設(shè)置 功能 ���, 因此本 設(shè)計(jì)采用 上述 方案進(jìn)行避障
1 . 3紅外遙控模塊 發(fā)射采用多路控制 的紅外發(fā)射器���,擁有 多個(gè)按鍵 �,可 以發(fā) 射 出不
同的信號(hào) �����, 代表不 同的控制功能 ��, 分別 可 以控制智能小 車的多種運(yùn)動(dòng)狀態(tài) 。 接收采
用 1838 一體化 紅外接收頭�, 內(nèi)部 電路包括紅外監(jiān)測(cè) 二極管 ,放 大器 ����,
8、 限副器 �����,帶
通濾 波器 ����,積 分 電路 �,比較器 等 �。 1. 4 直流 電機(jī)驅(qū)動(dòng)模塊 在 小車的前 方各安
裝一個(gè)直流 電機(jī) �, 分別控制左右輪子 的 轉(zhuǎn)動(dòng)�����, 從而帶動(dòng)整個(gè) 車體 的運(yùn)動(dòng) ����, 電機(jī)驅(qū)動(dòng) 使
用 以 LG9l10 電機(jī) 驅(qū)動(dòng)芯片為核心 的電機(jī)驅(qū)動(dòng)模 塊,通過(guò) 單片機(jī)編程從而控制輸 出高
低 電平信 號(hào)�, 將單片機(jī)輸 出信 號(hào)加在電機(jī)驅(qū)動(dòng)模塊上 ����, 在 通過(guò) 電機(jī)驅(qū)動(dòng)模 塊驅(qū)動(dòng) 電
機(jī)����,從而 實(shí)現(xiàn)對(duì) 電機(jī)轉(zhuǎn)動(dòng)的控制 。該模塊主要 以STC89C52單片機(jī) 為控制��,以LG9110
電機(jī)驅(qū)動(dòng)芯 片為 核心 ����, 從而 使小車能沿著 畫(huà)好 的跑道行走并能 自動(dòng)糾偏 ����。 本
9����、 設(shè) 計(jì)
采用 LG911O 電機(jī)驅(qū)動(dòng)芯 片���, LG91lO 是為控制盒驅(qū)動(dòng) 電機(jī) 設(shè)計(jì) 的兩通道推 挽式功率
放大 專用 集成電路器件 �,將分立 電路集成 在單片 Ic 中 ,使外 圍器件 成本 降低 ��,
整機(jī)可 靠性提高 。電路原 理 圖如 圖 4 所示 1 . 5 電源模 塊 電源模塊使用靈 活方 便
的單 電源供 電方 式�����,這種供 電方式 非常的簡(jiǎn)單和方便 ����,采用 4 只 1 . 5V 鎳氫 充電電
池 ,提供 6V 左右的 電壓 �����,分別給小車 的各個(gè) 模塊進(jìn)行供 電��。該 電源模塊 簡(jiǎn)單���,輕
便 ,可 以安裝在小車上 ���,從而使小車 自由方便 的行走 �,并且使 用 的鎳氫 電
10、池用完
后可 以進(jìn)行充 電�����,方便 重復(fù)使用 �����。
2軟件 設(shè)計(jì) 本 設(shè)計(jì)的系統(tǒng)軟件是利用 單片機(jī)集成 開(kāi)發(fā)環(huán) 境 Kei1C5l 作 為平 臺(tái)進(jìn)行 開(kāi)
發(fā)的 , Rei1C51 集成 開(kāi)發(fā) 環(huán)境 相 比其他開(kāi)發(fā)環(huán) 境 具有語(yǔ)句 生成的匯編代碼 緊湊�����,
易于理解���,并且生成 的 目標(biāo) 代 碼效率 高等一系列優(yōu) 點(diǎn)���。特 別是當(dāng)我們?cè)陂_(kāi)發(fā)大型軟
件 時(shí)與低 級(jí)語(yǔ)言相 比更能體現(xiàn) 出高級(jí)語(yǔ)言的優(yōu)勢(shì) ��。與匯編語(yǔ) 言等 其他低 級(jí)語(yǔ)言 相
比, c 語(yǔ) 言更 易于學(xué) 習(xí)和使用 ���,這是 由于 C 語(yǔ)言在功 能 上 ��、結(jié)構(gòu)性 、可讀性 �、可 維護(hù)性上與其他低級(jí)語(yǔ)言相 比擁 有明 顯 的優(yōu)勢(shì) ,因而如果
11�、 以前使用過(guò)匯編語(yǔ) 言開(kāi)發(fā)
軟件 , 再使用 c 語(yǔ) 言 來(lái)開(kāi) 發(fā) 軟件 ��, 體 會(huì)則 會(huì) 更加 的深刻 ����。 Kei1C51 軟件 使用 全 Windows 界 面 �����, 并 且 為 用 戶 提 供 了 功 能 強(qiáng) 大 的 集 成 開(kāi) 發(fā) 調(diào) 試 工 具 和豐 富的庫(kù)函數(shù) �����,有利 于用戶進(jìn)行軟件的開(kāi)發(fā) �。本 設(shè)計(jì)主程 序 的設(shè) 計(jì) 思 路 如 下:利用STC89C52單片機(jī)檢測(cè)連接紅外傳感器 的p3. 5���、p3. 6管腳是否接受到信號(hào)
判斷行駛 路徑是否偏離軌道 �,如偏 離軌道則 進(jìn)入軌道修 正狀態(tài) 以修正 軌道����,從而按
照我們?cè)?白色地 板上畫(huà) 出 的 黑 色 跑 道行 駛 ,單 片 機(jī)
12����、 同 時(shí)還 檢 測(cè) 連 接 紅 外傳 感 器 的 p3 . 7 管腳 是否收到信 號(hào)判 斷是否遇到障礙物 ��, 如探 測(cè)到障礙物 則 會(huì)
進(jìn) 入避 障狀態(tài) 以避開(kāi) 障礙物����,并且單片機(jī)還檢 測(cè)紅外接收 器 接是否收 到信 號(hào)�,如
接受 到信號(hào)啟動(dòng)紅外遙控模塊 �,執(zhí)行人 工遙 控 控 制 , 然 后 繼 續(xù) 尋跡 ���。
3 結(jié)語(yǔ) 本設(shè)計(jì) 中智 能小車采用模塊化 的設(shè)計(jì)思想 ��, 各模 塊見(jiàn)獨(dú)立 性強(qiáng) �, 經(jīng)過(guò)實(shí)驗(yàn) 測(cè)
試 �, 小車能很好 的完成尋跡����、 避障 �、紅外遙 控等功能 ����, 并且 該智能小車可 以應(yīng)用 到 工廠搬運(yùn)車 �����、校園觀光 車等方面 ,具有很 重要 的實(shí)用價(jià)值 ��。
參考文獻(xiàn):f11
13��、祝勝光��,智能尋跡小車設(shè)計(jì)與研 究��,科技風(fēng)����,2009, 25⑺f2150交鳳����,智
能 尋 跡 小車 ��,電子 制 作 , 2012��, 1(1) 【3】苑毅 ���、張志超 、李偉 �����,智能避障小車
設(shè)計(jì),自動(dòng)化與儀 器儀表�,2011. 25(5) f41姬紅旭�,基 于STC89C52單片機(jī) 智能避障
小車設(shè)計(jì) �����,職業(yè)技 術(shù)��, 2011 . 10(8). 【5】謝 青 �,紅 外遙控 小車 的設(shè)計(jì) ,成 都紡
織高等 ?��??學(xué)校 學(xué)報(bào) �, 2009����, 20(4) 【 6】侯 麗春 、孫志強(qiáng) �����、陸榮�,紅外傳 感 器在
機(jī) 器人 避障 系統(tǒng) 中的應(yīng) 用����,科技咨詢導(dǎo)報(bào) �����, 2007����, 11(1) [7】馮旭 升 ,直流 電機(jī) 驅(qū)
動(dòng) 模 塊及 其 應(yīng) 用 ��,家庭 電 子 , 2004����, 1(5)
(此文檔部分內(nèi)容來(lái)源于網(wǎng)絡(luò), 如有侵權(quán)請(qǐng)告知?jiǎng)h除����, 文檔可自行編輯修改內(nèi)容���,
供參考,感謝您的配合和支持)
編輯版 word
 基于STC89C52單片機(jī)智能小車設(shè)計(jì)
基于STC89C52單片機(jī)智能小車設(shè)計(jì)