《【系統(tǒng)設(shè)計(jì)論文】采煤機(jī)電纜自動控制系統(tǒng)設(shè)計(jì)研究》由會員分享�,可在線閱讀,更多相關(guān)《【系統(tǒng)設(shè)計(jì)論文】采煤機(jī)電纜自動控制系統(tǒng)設(shè)計(jì)研究(3頁珍藏版)》請?jiān)谘b配圖網(wǎng)上搜索�。
1、【系統(tǒng)設(shè)計(jì)論文】采煤機(jī)電纜自動控制系統(tǒng)設(shè)計(jì)研究
針對綜采工作面電牽引采煤機(jī)供電電纜裝置存在的可靠性差�、自動化程度低的問題,設(shè)計(jì)并實(shí)現(xiàn)電纜自動拖拽控制系統(tǒng)���。以PLC控制器�����、變頻器為核心���,控制電纜拖拽裝置的運(yùn)行速度與采煤機(jī)速度協(xié)同隨動,并可根據(jù)采煤機(jī)運(yùn)行方向協(xié)同配合����。詳細(xì)分析系統(tǒng)組成、硬件以及軟件設(shè)計(jì)�����。在地面搭建模式試驗(yàn)場地��,模擬井下坡度、障礙物試驗(yàn)�。模擬實(shí)驗(yàn)結(jié)果表明,設(shè)計(jì)并實(shí)現(xiàn)的電纜自動拖拽控制系統(tǒng)能夠保證采煤機(jī)供電電纜與采煤機(jī)協(xié)同隨動����,不發(fā)生彎折以及二次彎折故障,保證采煤機(jī)供電的持續(xù)性和可靠性��。綜采工作面電牽引采煤機(jī)運(yùn)行時���,供電電纜隨采煤機(jī)進(jìn)行運(yùn)動��。如果缺乏有效的電纜拖拽裝置�,長時間運(yùn)
2��、行后���,會導(dǎo)致采煤機(jī)供電電纜的碾壓、磨損甚至斷裂��,導(dǎo)致頻發(fā)維護(hù)以及更換供電電纜�,間接影響采煤機(jī)的生產(chǎn)效率。研究并設(shè)計(jì)一種適用于采煤機(jī)的供電電纜自動拖拽裝置�����,使得電纜能夠跟隨采煤機(jī)進(jìn)行協(xié)同隨動運(yùn)動,保護(hù)供電電纜免受煤塊碾壓以及磨損���。波蘭柯派克斯公司的“黑龍”采煤系統(tǒng)���,首次使用采煤機(jī)電纜拖拽裝置,安裝與順槽巷道中���,防止采煤機(jī)上下行或改變方向時供電電纜發(fā)生彎折或二次彎曲����。國內(nèi)根據(jù)急傾斜煤層采煤機(jī)開發(fā)出液壓絞車型電纜拖拽系統(tǒng)�����,該系統(tǒng)輸出恒定張力���,保證在采煤機(jī)運(yùn)行過程中���,電纜夾與電纜始終保持張緊狀態(tài)。但該裝置存在的問題是采煤機(jī)上行時��,該裝置受到的滑道阻力較大,導(dǎo)致該裝置的使用壽命較低��,實(shí)用性不大�。神東煤炭
3、分公司開發(fā)了一種電纜收放裝置��,通過對應(yīng)的液壓控制閥進(jìn)行控制���,可實(shí)現(xiàn)電纜的令排列機(jī)構(gòu)做往復(fù)式運(yùn)動���,解決了電纜的二次彎折問題,但是該裝置需人工操作�����。山東能源集團(tuán)開發(fā)的TL445/630G自動拖纜裝置�,采用動滑輪系統(tǒng),實(shí)現(xiàn)了電纜夾與采煤機(jī)同步行走�����,并可實(shí)現(xiàn)自動換向��。但該裝置在實(shí)際使用中�,動滑輪系統(tǒng)中的鋼絲繩可能會被煤塊砸中,可靠性不佳��。根據(jù)綜采工作面采煤機(jī)供電電纜實(shí)際運(yùn)行情況�����,設(shè)計(jì)以PLC控制器為核心的電纜自動拖拽控制系統(tǒng)����。
1系統(tǒng)組成
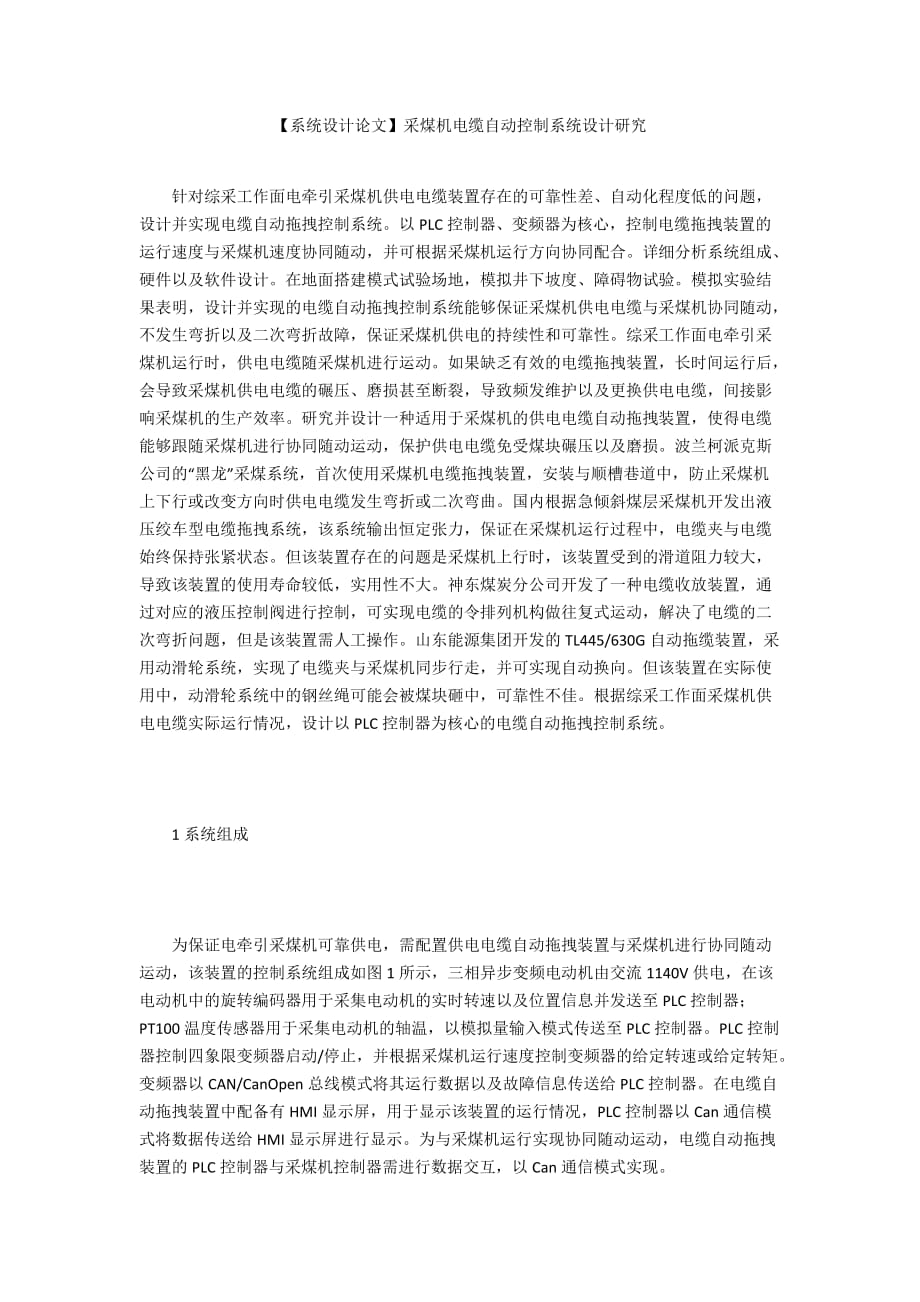
為保證電牽引采煤機(jī)可靠供電,需配置供電電纜自動拖拽裝置與采煤機(jī)進(jìn)行協(xié)同隨動運(yùn)動�����,該裝置的控制系統(tǒng)組成如圖1所示�,三相異步變頻電動機(jī)由
4、交流1140V供電����,在該電動機(jī)中的旋轉(zhuǎn)編碼器用于采集電動機(jī)的實(shí)時轉(zhuǎn)速以及位置信息并發(fā)送至PLC控制器;PT100溫度傳感器用于采集電動機(jī)的軸溫�����,以模擬量輸入模式傳送至PLC控制器����。PLC控制器控制四象限變頻器啟動/停止�����,并根據(jù)采煤機(jī)運(yùn)行速度控制變頻器的給定轉(zhuǎn)速或給定轉(zhuǎn)矩��。變頻器以CAN/CanOpen總線模式將其運(yùn)行數(shù)據(jù)以及故障信息傳送給PLC控制器���。在電纜自動拖拽裝置中配備有HMI顯示屏,用于顯示該裝置的運(yùn)行情況�,PLC控制器以Can通信模式將數(shù)據(jù)傳送給HMI顯示屏進(jìn)行顯示。為與采煤機(jī)運(yùn)行實(shí)現(xiàn)協(xié)同隨動運(yùn)動�����,電纜自動拖拽裝置的PLC控制器與采煤機(jī)控制器需進(jìn)行數(shù)據(jù)交互��,以Can通信模式實(shí)現(xiàn)���。
5�、
2硬件設(shè)計(jì)
采煤機(jī)電纜自動拖拽控制系統(tǒng)中的主要硬件包括控制器組件��、變頻器、變頻異步電動機(jī)��、HMI顯示屏以及外接的急停開關(guān)��、啟動/停止開關(guān)�、傳感器等�����。PLC控制器組件選用S7-1200CPU系列以及DI/DO/AI/AO擴(kuò)展模塊����,該控制器處理速度塊、實(shí)時性強(qiáng)��、功耗低�;擁有50KB的用戶程序存儲空間,自帶14點(diǎn)輸入/14點(diǎn)輸出的板載數(shù)字I/O�,可擴(kuò)展3個CAN通信模塊,滿足電纜自動拖拽控制系統(tǒng)要求�。考慮到綜采工作面環(huán)境惡劣���,選用的變頻器必須具有較高級別的防護(hù)能力以及康干擾能力�,因此選用ABB公司的A10007-1四象限變頻器完成對異步變頻電動機(jī)的控制,該變頻器具備轉(zhuǎn)速
6�����、���、轉(zhuǎn)矩以及恒轉(zhuǎn)速��、恒功率運(yùn)行模式�����,可實(shí)現(xiàn)變頻電動機(jī)的無極調(diào)速�����,調(diào)速范圍較大�����,且自帶PID��、模糊PID等多種內(nèi)嵌控制算法����。同時該變頻器可實(shí)現(xiàn)電源側(cè)/負(fù)載測的短路、過電流����、鎖相遺失、母線電壓過低等多種保護(hù)和故障停機(jī)�����,保證電動機(jī)的安全���、穩(wěn)定運(yùn)行。HMI顯示屏選用MCGS組態(tài)軟件系統(tǒng)�����,可快速生成監(jiān)控系統(tǒng)���,該顯示屏的供電電壓為DC24V���,主板采用ARM低功耗CPU,主頻頻率為400MHZ����,配備有RS232\RS485以及CAN/CanOpen通信接口,防護(hù)等級為IP67,滿足綜采工作面惡劣環(huán)境要求���。變頻異步電動機(jī)為按照要求定制開發(fā)�。
3軟件設(shè)計(jì)
采煤機(jī)電纜自動拖拽控制系統(tǒng)
7�����、的軟件流程見圖2所示�����。系統(tǒng)上電后�����,首先完成初始化以及系統(tǒng)自檢工作�����,當(dāng)系統(tǒng)自檢有故障時����,需進(jìn)行故障恢復(fù)。當(dāng)該控制系統(tǒng)檢測到有采煤機(jī)信號后�����,判斷采煤機(jī)當(dāng)前狀態(tài)時上行還是下行。如果采煤機(jī)運(yùn)行方向?yàn)樯闲?���,則控制電纜自動拖拽裝置進(jìn)行恒轉(zhuǎn)矩跟隨上行運(yùn)行,PLC控制器控制四象限變頻器對其運(yùn)行速度進(jìn)行微調(diào)并滿足與采煤機(jī)的跟隨距離����。如果采煤機(jī)運(yùn)行方向?yàn)橄滦校瑒t控制電纜自動拖拽裝置進(jìn)行恒轉(zhuǎn)矩跟隨下行運(yùn)行�。電纜自動拖拽裝置運(yùn)行過程中有故障發(fā)生時�����,PLC控制器會觸發(fā)故障輸出信號��,并在HMI顯示屏進(jìn)行故障類別�����、發(fā)生時間的顯示����,并觸發(fā)采煤機(jī)控制器和拖拽裝置控制器發(fā)出停車信號��。
4模擬試驗(yàn)
8���、為驗(yàn)證設(shè)計(jì)的采煤機(jī)電纜自動拖拽控制系統(tǒng)的功能,在地面搭建試驗(yàn)環(huán)境進(jìn)行模擬試驗(yàn)��,對采煤機(jī)和刮板輸送機(jī)進(jìn)行設(shè)計(jì)改造���,并模擬采煤機(jī)井下實(shí)際工作情況���。將刮板運(yùn)輸機(jī)設(shè)計(jì)為可彎曲3,水平1.5���,底部喲個枕木抬高�����,模擬彎曲��。在電纜槽中插入枕木用以模擬井下障礙�����,即該自動拖拽裝置遇到障礙物時���,阻力增大�,拖纜電動機(jī)輸出電流增大�,當(dāng)輸出電流大于設(shè)置值區(qū)間時,控制器發(fā)出過電流報(bào)警并發(fā)出停車信號�,采煤機(jī)停止運(yùn)行。在電纜槽中人工堆煤���,運(yùn)行阻力增加��,采煤機(jī)牽引速度減??���;將堆煤人工清理一部分�����,運(yùn)行阻力逐漸減小�,采煤機(jī)牽引速度逐漸增加。在采煤機(jī)牽引速度增加或減小過程中��,檢測電纜自動拖拽裝置運(yùn)行速度�,與采煤機(jī)牽引速度保持協(xié)同隨動�����。
5結(jié)語
電牽引采煤機(jī)供電電纜為采煤機(jī)提供動力源����,若供電電纜發(fā)生碾軋���、彎折等故障����,將嚴(yán)重影響采煤機(jī)的生產(chǎn)效率����。設(shè)計(jì)并實(shí)現(xiàn)電纜自動拖拽系統(tǒng),在保護(hù)供電電纜的同時���,能夠保證采煤機(jī)供電的持續(xù)和穩(wěn)定性�,具有重要的生產(chǎn)實(shí)踐意義��。
 【系統(tǒng)設(shè)計(jì)論文】采煤機(jī)電纜自動控制系統(tǒng)設(shè)計(jì)研究
【系統(tǒng)設(shè)計(jì)論文】采煤機(jī)電纜自動控制系統(tǒng)設(shè)計(jì)研究