《并聯(lián)六自由度運(yùn)動(dòng)平臺(tái)》由會(huì)員分享���,可在線閱讀��,更多相關(guān)《并聯(lián)六自由度運(yùn)動(dòng)平臺(tái)(12頁珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索�����。
1���、精品
-可編輯-
并聯(lián)六自由度運(yùn)動(dòng)平臺(tái)
1.概述
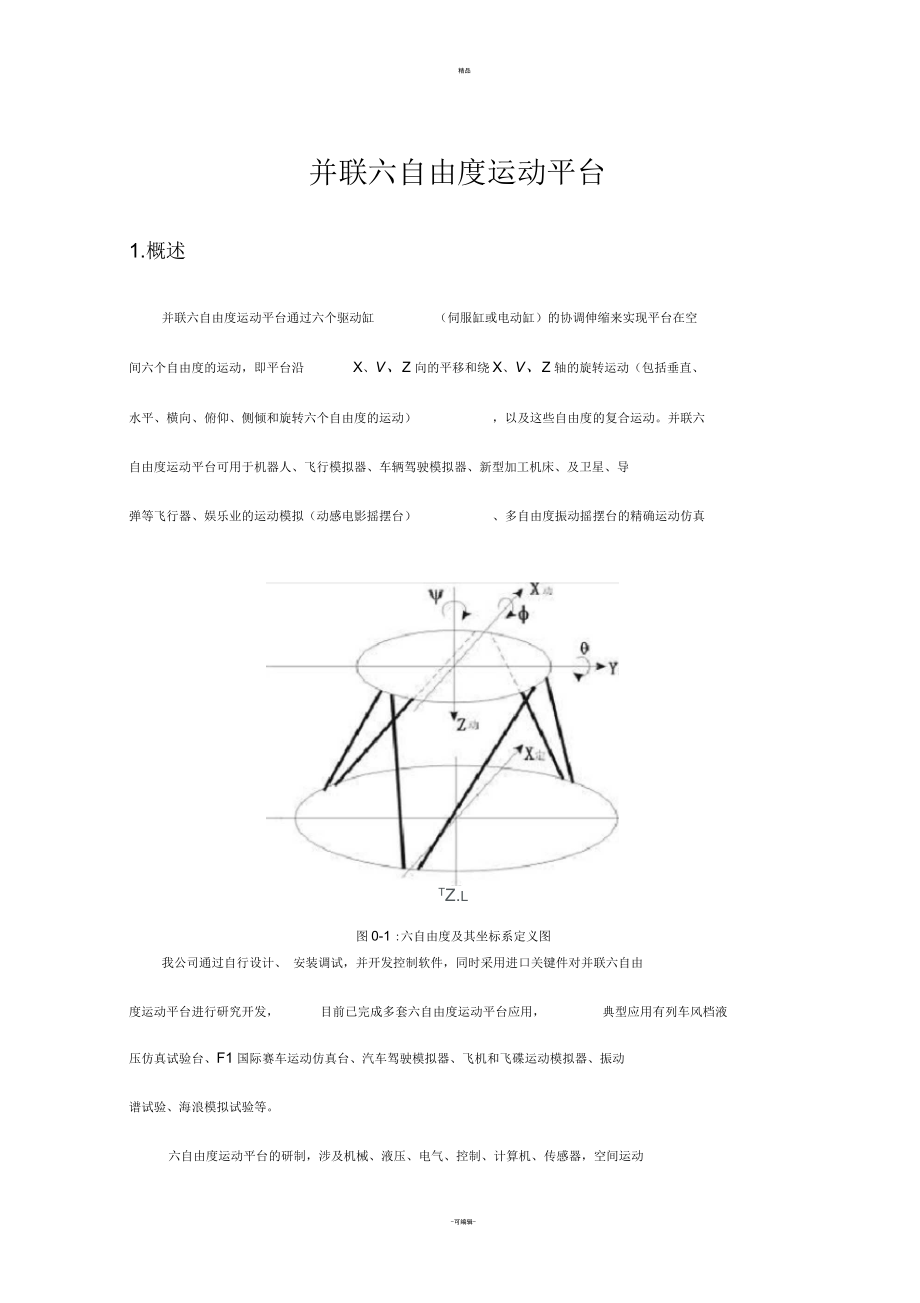
并聯(lián)六自由度運(yùn)動(dòng)平臺(tái)通過六個(gè)驅(qū)動(dòng)缸 (伺服缸或電動(dòng)缸)的協(xié)調(diào)伸縮來實(shí)現(xiàn)平臺(tái)在空
間六個(gè)自由度的運(yùn)動(dòng),即平臺(tái)沿 X、V��、Z向的平移和繞X����、V、Z軸的旋轉(zhuǎn)運(yùn)動(dòng)(包括垂直�����、
水平�����、橫向�����、俯仰���、側(cè)傾和旋轉(zhuǎn)六個(gè)自由度的運(yùn)動(dòng)) �����,以及這些自由度的復(fù)合運(yùn)動(dòng)���。并聯(lián)六
自由度運(yùn)動(dòng)平臺(tái)可用于機(jī)器人�、飛行模擬器�、車輛駕駛模擬器、新型加工機(jī)床���、及衛(wèi)星�、導(dǎo)
彈等飛行器����、娛樂業(yè)的運(yùn)動(dòng)模擬(動(dòng)感電影搖擺臺(tái)) ���、多自由度振動(dòng)搖擺臺(tái)的精確運(yùn)動(dòng)仿真
TZ.l
圖0-1 :六自由度及其坐標(biāo)系定義圖
我公司通過自行設(shè)計(jì)��、 安裝調(diào)試���,并
2、開發(fā)控制軟件�,同時(shí)采用進(jìn)口關(guān)鍵件對(duì)并聯(lián)六自由
度運(yùn)動(dòng)平臺(tái)進(jìn)行研究開發(fā), 目前已完成多套六自由度運(yùn)動(dòng)平臺(tái)應(yīng)用���, 典型應(yīng)用有列車風(fēng)檔液
壓仿真試驗(yàn)臺(tái)��、F1國(guó)際賽車運(yùn)動(dòng)仿真臺(tái)����、汽車駕駛模擬器、飛機(jī)和飛碟運(yùn)動(dòng)模擬器�、振動(dòng)
譜試驗(yàn)、海浪模擬試驗(yàn)等�。
六自由度運(yùn)動(dòng)平臺(tái)的研制,涉及機(jī)械���、液壓����、電氣����、控制、計(jì)算機(jī)���、傳感器��,空間運(yùn)動(dòng)
數(shù)學(xué)模型��、 實(shí)時(shí)信號(hào)傳輸處理��、 圖形顯示���、動(dòng)態(tài)仿真等一系列高科技領(lǐng)域��, 是液壓及控制技
術(shù)領(lǐng)域的頂級(jí)產(chǎn)品�����。
2 . 系統(tǒng)組成
2.1 液壓伺服類
典型的液壓式并聯(lián)六自由度運(yùn)動(dòng)平臺(tái)主要由機(jī)械系統(tǒng)�����、 液壓系統(tǒng)���、 控制系統(tǒng)硬件和控制
系統(tǒng)軟件四部分組成。
機(jī)械系統(tǒng)主
3��、要包括:承載平臺(tái)���、上下連接鉸鏈、固定座�����。
液壓系統(tǒng)主要包括:泵站系統(tǒng)、伺服閥�、驅(qū)動(dòng)器、伺服油缸和閥塊管路����。
控制系統(tǒng)硬件主要包括: 實(shí)時(shí)處理器、伺服控制單元��、信號(hào)調(diào)理單元��、 監(jiān)控單元和泵站
控制單元����。
控制系統(tǒng)軟件包括: 實(shí)時(shí)信號(hào)處理單元、 實(shí)時(shí)運(yùn)算單元��、 伺服控制和特殊要求處理單元�。
2.2 電動(dòng)伺服類
電動(dòng)式并聯(lián)六自由度運(yùn)動(dòng)平臺(tái)則將伺服油缸用電動(dòng)缸代替, 而伺服閥����、 泵站系統(tǒng)及閥塊
管路等則相應(yīng)取消,增
加運(yùn)動(dòng)控制單元�。 具有系統(tǒng)簡(jiǎn)潔、 響應(yīng)速度快等優(yōu)點(diǎn)��, 是多自由度平臺(tái)今后重點(diǎn)發(fā)展的
方向。
3 .主要技術(shù)參數(shù)
以下參數(shù)為液壓類平臺(tái)典型值�,具體可按用戶要求設(shè)計(jì)制造。
4����、
3.1 平臺(tái)主要參數(shù)
平臺(tái)最大負(fù)載:靜態(tài)>2000KG ,動(dòng)態(tài)>3000KG 。
上平臺(tái)球較分布園直徑 1400mm ,相鄰球心距離157mm ;
下平臺(tái)球較分布園直徑 1600mm ,相鄰球心距離167mm ;
伺服缸最小球餃球心距離 800mm ,最大長(zhǎng)度1200mm ;(采用①63/45~400 缸體)����。
平臺(tái)初始高度約 700mm 。
3. 2泵站技術(shù)指標(biāo)
額定流量:90L/min
最大系統(tǒng)壓力:12Mpa ;
泵站電機(jī)功率:22KW ;
空間尺寸:1400 X1200 X1320
3.3運(yùn)動(dòng)參數(shù)
伺服缸運(yùn)動(dòng)速度 >200mm/S ;有效行程》400mm ��。
5�、
主要運(yùn)動(dòng)參數(shù)如下表:
運(yùn)動(dòng)型式
位移
速度
加速度
俯仰
16
20 7s
30 7s2
滾轉(zhuǎn)
16
20 7s
30 7s2
偏航
16
+20 7s
30 7s2
垂直升降
200mm
200mm/s
4m/s2
縱向位移
150mm
150mm/s
2m/s2
側(cè)向位移
150mm
150mm/s
2m/s2
3 . 4 電動(dòng)伺服平臺(tái)
電動(dòng)伺服平臺(tái)省去了泵站系統(tǒng)及伺服閥、 伺服油缸��, 而直接用電動(dòng)缸���、 伺服電機(jī)和相應(yīng)
的伺服放大器代替����。
電動(dòng)缸:電動(dòng)缸可根據(jù)用戶要求選用進(jìn)口( Exlar 系列)或國(guó)產(chǎn)產(chǎn)品(由本公司自
6�����、行研
發(fā)生產(chǎn)���,采用進(jìn)口滾珠絲杠成套) �����。
伺服電機(jī):伺服電機(jī)可選用三菱�、安川����、松下、臺(tái)達(dá)等產(chǎn)品�。
伺服放大器:采用與伺服電機(jī)品牌對(duì)應(yīng)的伺服放大器。
4 .平臺(tái)控制系統(tǒng)
5 . 1 伺服運(yùn)動(dòng)控制器
平臺(tái)控制系統(tǒng)由伺服運(yùn)動(dòng)控制器��、控制計(jì)算機(jī)�����、其配電操作柜等組成�。
伺服運(yùn)動(dòng)控制器安裝在配電操作柜內(nèi)部, 操作柜另配置觸屏便于一些基本參數(shù)的設(shè)置和
顯示��。
伺服運(yùn)動(dòng)控制器是六自由度平臺(tái)控制系統(tǒng)的核心����, 它是一種高性能閉環(huán)實(shí)時(shí)控制器�, 集
成了高速模擬量采集���、 高速浮點(diǎn)處理器�����、 高速 DA 端口���, 是針對(duì) Stewart 平臺(tái)應(yīng)用的專用控
制器。
伺服運(yùn)動(dòng)控制器包括相對(duì)獨(dú)立的六組控制
7��、回路�, 對(duì)于每組回路由位置控制環(huán)組成, 它和
線性位移傳感器�����、 伺服比例閥和伺服缸構(gòu)成快速高精度數(shù)字閉環(huán)控制系統(tǒng)�, 從而使單伺服缸
控制穩(wěn)態(tài)誤差小于 0.1 毫米。
精品
4 . 2 控制系統(tǒng)主要功能:
1) 操作監(jiān)控計(jì)算機(jī)��,可以進(jìn)行運(yùn)動(dòng)函數(shù)編程�����,與運(yùn)動(dòng)控制器接口����,完成各種命令和參
數(shù)設(shè)定。
2) 所有輸入輸出均具有硬件保護(hù)電路�,具有故障定位和凍結(jié)能力。
3) 控制器在即使在復(fù)雜控制條件下���,仍能保證閉環(huán)控制周期小于 10ms ���。
4) 控制器具有保護(hù)算法, 當(dāng)超出模擬臺(tái)運(yùn)動(dòng)范圍的指令給出時(shí)會(huì)發(fā)出報(bào)警信號(hào)并進(jìn)行運(yùn)
動(dòng)限制��。
5) 控制器能自動(dòng)判斷識(shí)別非法命令�����,避免設(shè)備誤
8���、動(dòng)作��。
6) 實(shí)現(xiàn)泵站的基本起?��?刂?,狀態(tài)監(jiān)視��。
4 . 3 數(shù)據(jù)接口:
伺服運(yùn)動(dòng)控制器可以通過 Modbus TCP 協(xié)議與用戶控制操作計(jì)算機(jī)連接�����,控制器提供
上位機(jī)應(yīng)用函數(shù)接口�����,便于第三方應(yīng)用軟件連接��。
伺服運(yùn)動(dòng)控制器可以通過 RS232/485 與具有串行通訊能力的設(shè)備進(jìn)行通訊�����, 通訊協(xié)議
為 Modbus RTU 或自行定義的自由協(xié)議���。
5 .主要應(yīng)用示例
5 . 1 列車風(fēng)檔液壓仿真試驗(yàn)臺(tái)
列車運(yùn)動(dòng)仿真測(cè)試系統(tǒng)實(shí)現(xiàn)對(duì)列車各種工況下的運(yùn)動(dòng)軌跡進(jìn)行計(jì)算仿真���、 模擬運(yùn)動(dòng)�����, 同
時(shí)對(duì)列車產(chǎn)品如折棚式風(fēng)檔等進(jìn)行產(chǎn)品性能測(cè)試�。
圖0-2列車風(fēng)檔液壓仿真試驗(yàn)臺(tái)現(xiàn)場(chǎng)實(shí)景圖
9���、
并聯(lián)六自由度運(yùn)動(dòng)平臺(tái)
系統(tǒng)能夠根據(jù)給定的列車軌跡參數(shù),計(jì)算出列車運(yùn)動(dòng)軌跡及其他相關(guān)參數(shù)����。
列車軌跡計(jì)算主要參數(shù)如下:
a) S曲線半徑R
b) S曲線直線段長(zhǎng)度 W
c)平臺(tái)正三角形邊長(zhǎng) A
d)列車長(zhǎng)度L
e)列車輪距N
f)連桿長(zhǎng)度P
g)連桿絞點(diǎn)至輪軸距 M
h)列車速度v�
車 運(yùn) 動(dòng) 防 真 系 統(tǒng)
口 F
圖0-3列車風(fēng)檔液壓彳^真試驗(yàn)臺(tái) HMI界面
試驗(yàn)臺(tái)能夠仿真如下運(yùn)動(dòng)軌跡:
a)含直線段S曲線水平運(yùn)動(dòng)
b)園曲線水平運(yùn)動(dòng)
c)切園曲線水平運(yùn)動(dòng)
d)含直線段S曲線垂直運(yùn)動(dòng)
e)園曲線垂直運(yùn)動(dòng)
f)切園曲線垂直運(yùn)動(dòng)
g)翻轉(zhuǎn)運(yùn)動(dòng)
10、
h)混合運(yùn)動(dòng)
5. 2 F1賽車運(yùn)動(dòng)仿真臺(tái)
F1賽車運(yùn)動(dòng)仿真臺(tái)用于上海 F1國(guó)際賽車場(chǎng)���,操作者可以坐到仿真平臺(tái)上�����, 平臺(tái)前方放
置一液晶顯示屏�,顯示賽車動(dòng)畫場(chǎng)景���,操作者可以通過操縱桿進(jìn)行起動(dòng)�、加速���、左右拐���、側(cè)
滑���、剎車、顛簸行使等動(dòng)作���,同時(shí)仿真臺(tái)根據(jù)這些動(dòng)作進(jìn)行動(dòng)態(tài)模擬�����, 讓操作者親身體驗(yàn)賽
車動(dòng)感����。
圖0-4 F1賽車運(yùn)動(dòng)仿真臺(tái)現(xiàn)場(chǎng)實(shí)景圖
F1賽車運(yùn)動(dòng)仿真臺(tái)為六自由度運(yùn)動(dòng)平臺(tái)的開發(fā)應(yīng)用��,主要由計(jì)算機(jī)操作動(dòng)畫系統(tǒng)�����、六
缸液壓伺服運(yùn)動(dòng)系統(tǒng)和實(shí)時(shí)控制系統(tǒng)組成����。
計(jì)算機(jī)操作動(dòng)畫系統(tǒng)采用高性能服務(wù)器主機(jī)與 34”液晶顯示屏���,動(dòng)態(tài)模擬賽車場(chǎng)景。
六缸液壓伺服運(yùn)動(dòng)系統(tǒng)采用進(jìn)口比
11����、例伺服閥控制, 頻響時(shí)間小于20ms ,液壓缸內(nèi)置高
精度位移傳感器�����。另單獨(dú)配有提供動(dòng)力的泵站單元���。
實(shí)時(shí)控制系統(tǒng)根據(jù)計(jì)算機(jī)系統(tǒng)的動(dòng)作指令信號(hào)動(dòng)態(tài)運(yùn)算并調(diào)節(jié)控制液壓缸動(dòng)作, 實(shí)現(xiàn)與
動(dòng)畫場(chǎng)景動(dòng)作同步���。
5. 3特種機(jī)車駕駛模擬器
特種機(jī)車駕駛模擬器主要由六自由度平臺(tái)�����、實(shí)物駕駛室�����、 模型小車���、地貌沙盤�、視景影
像系統(tǒng)等組成�。實(shí)現(xiàn)了特種機(jī)車駕駛視覺、聽覺��、操縱��、環(huán)境����、不同路況、不同氣候等的綜 合模擬����。
實(shí)物駕駛室內(nèi)主要部件如檔位、 方向盤�、儀表板、座椅等均采用實(shí)車部件���。方向盤力矩
按實(shí)車模擬�����,力求在操縱上有實(shí)車感覺�����。
圖0-5特種機(jī)車駕駛模擬器現(xiàn)場(chǎng)實(shí)景圖
模型小車按照實(shí)物駕
12����、駛室內(nèi)發(fā)出的各種指令(加減速、左右轉(zhuǎn)向����、剎車、顛簸等) ����,在
地貌沙盤上行駛�,同時(shí)將地貌狀況傳輸給影像虛擬場(chǎng)景系統(tǒng), 模型小車實(shí)際空間坐標(biāo)參數(shù) (中
心點(diǎn)空間位置 X, Y, Z及歐拉夾角a , 3, 丫)反饋給六自由度控制器�,控制系統(tǒng)計(jì)算并仿 真出模型小車實(shí)際動(dòng)感狀態(tài)。
5. 4海浪模擬器
六自由度平臺(tái)可以模擬海浪動(dòng)作���,以驗(yàn)證艦艇���、船舶等在實(shí)際航行時(shí)的各項(xiàng)參數(shù)指標(biāo)。
-可編輯-
圖0-6海浪模擬器現(xiàn)場(chǎng)實(shí)景圖
5. 5飛機(jī)和飛碟模擬器
飛機(jī)和飛碟模擬器主要應(yīng)用于娛樂行業(yè)�, 如科技館�、
各種飛行姿態(tài)�����,輔以空間魔幻場(chǎng)景�����,給人一種身臨其境的美感���。
圖0-7飛機(jī)模擬現(xiàn)場(chǎng)實(shí)景圖
游樂場(chǎng)等�����?����?梢阅M飛行器的空中
圖0-8飛碟模擬現(xiàn)場(chǎng)實(shí)景圖
 并聯(lián)六自由度運(yùn)動(dòng)平臺(tái)
并聯(lián)六自由度運(yùn)動(dòng)平臺(tái)